
Wem es nach dem Lesen des iSpindel Grundlagenartikels von Samuel Lang in den Fingern juckt, sich selbst eine iSpindel zu bauen, gehen vermutlich einige dieser Fragen durch den Kopf:
- Wo bekommt man die Bauteile her?
- Sind tiefgreifende Elektronikkenntnisse für den Zusammenbau erforderlich?
- Was ist beim Zusammenbau zu beachten und was braucht man alles dafür?
- Wie wird die Firmware geflasht und wie testet man eine frisch zusammengelötete iSpindel?
- Was tun, wenn die iSpindel nicht wie erwartet funktioniert?
- Müssten da nicht noch Gewichte rein?
- Wie kalibriert man eine iSpindel und kann man eventuell auch ohne Kalibrierung starten?
Diese Fragen versuche ich in diesem Teil der iSpindel Artikelserie zu beantworten.
Bezugsquellen
Die elektronischen Bauteile können über die üblichen Onlineshopping Plattformen bestellt werden. Etwas schwieriger wird es beim 3D Druck Schlitten, dem PETling und der iSpindel Platine, weil diese Teile genau zueinander passen müssen. Beim Zusammensuchen der Komponenten in der Onlineshopping Plattform seiner Wahl wird manch einer feststellen, dass man einige der Kleinteile nur in 20iger Packs bekommt und, dass die Versandkosten durch den Kauf bei unterschiedlichen Händlern schnell den eigentlichen Warenwert überschreiten.
Um die Einstiegshürde niedrig zu halten, konnte der Onlinehänder 3D Mechatronics aus Bremen für das iSpindel Projekt gewonnen werden, der uns seit dem Ende der Testphase im September 2016 die Treue hält. In seinem Onlineshop (www.3d-mechatronics.de) bietet er alle Teile zum Bau einer iSpindel in einem Komplettpaket an, das neben den elektronischen Bauteilen eine geätzte Platine, den 3D-Druck Schlitten und einen dazu passenden PETling enthält. Auch Ersatzteile, genormte Austausch-PETlinge und Ersatzdeckel sind hier bestellbar.
Tjorben Eberle, der Inhaber von 3D Mechatronics, unterstützt das iSpindel Projekt enthusiastisch. In enger Abstimmung mit dem Team nutzt er das Kundenfeedback zur Verbesserung des Bausatzes und seiner Step-by-Step Anleitung für den Zusammenbau der iSpindel.
Zusammenbau
Der Zusammenbau des Bausatzes zur fertigen iSpindel geht mit der bebilderten Lötanleitung von 3D Mechatronics leicht von der Hand. Diese Anleitung ist immer auf die aktuell ausgelieferte Version des Bausatzes abgestimmt und setzt keine Elektronikkenntnisse voraus. Etwas Übung mit dem Lötkolben ist allerdings von Vorteil. Die Lötanleitung ist im Onlineshop unter dem Komplettbausatz verlinkt.
Folgende Dinge sind zusätzlich zum Bausatz erforderlich:
- leistungsfähiger Feinlötkolben (optimalerweise potentialfrei)
- feines Lötzinn (0,25−0,5 mm)
- 20–25g Trimmgewicht
(4−5 Gewichte je 5 Gramm oder Bleigranulat + Epoxidharz) - Heißklebepistole + Sticks
- kleiner Seitenschneider
- Ergänzend sind ein Digitalmultimeter zur Fehlersuche und eine gute Lupe für die feinen Lötstellen empfehlenswert.
Nach dem Zusammenbau der Hardware wird ein Mini- bzw. Micro-USB Kabel zum Aufladen des Akkus und ein Micro-USB Kabel zum flashen der Firmware benötigt. Bei dem Micro-USB Kabel ist darauf zu achten, dass es 4‑adrig belegt ist. 2‑adrige USB Kabel, die häufig sehr günstigen 5V Ladesteckern beiliegen, sind aufgrund der fehlenden beiden Signalleitungen nicht zum flashen der Firmware geeignet.
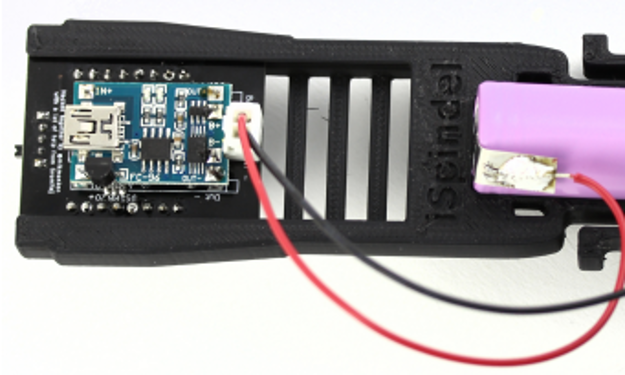
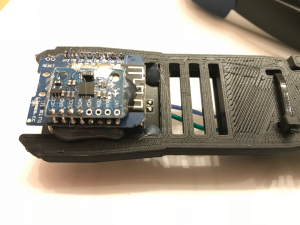
Wurde das Innere der iSpindel entsprechend der Anleitung zusammengelötet, sieht es in etwa so aus:
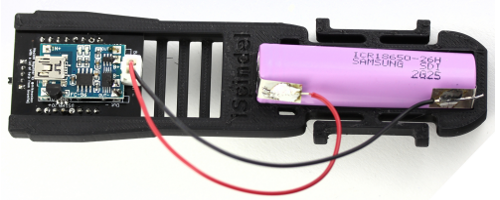
Abb 1: Das Innere der Spindel
Ein wichtiger Hinweis an dieser Stelle:

Abb 2: Eingangsdiode des Wemos
Vor dem Anschließen eines USB Kabels ist unbedingt sicherzustellen, dass die Eingangsdiode des Wemos entsprechend der Anleitung entfernt wurde. Wird dies vergessen, geht in den besseren Fällen nur etwas Hardware kaputt. In schlimmeren Fällen kann sich der Akku durch das ungeregelte Aufladen selbst entzünden oder gar explodieren.
Ebenfalls ratsam ist es, alle Lötstellen vor dem Anschließen des Ladekabels noch einmal gewissenhaft mit einer Lupe zu kontrollieren. Besonders bei den drei Beinchen des Temperatursensors DS18B20 schleichen sich vermehrt Fehler ein.
Zu diesem Zeitpunkt ist es empfehlenswert, die Heißklebepistole noch eine Weile in der Werkzeugkiste zu lassen, den Akku zu laden, die Firmware zu flashen und einen ersten Funktionstest durchzuführen. Der Akku muss vollständig aufgeladen sein, bevor die Firmware geflasht werden darf. Ebenso ist zu beachten, dass die Firmware nur auf einer vollständig zusammengebauten iSpindel fehlerfrei ausgeführt werden kann. Ein Funktionstest mit bloßem Microcontroller wird aufgrund der fehlenden Sensoren nicht funktionieren.
Aufladen des Akkus
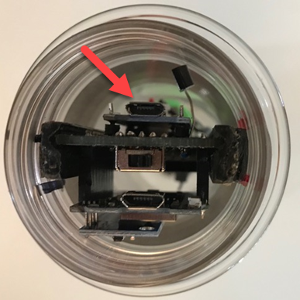
Abb 3: Lademodul
Der Akku wird über den USB Port des Lademoduls TP-4056 aufgeladen. Das ist die kleinere der beiden Baugruppen, auf der Akkuseite des Schlittens.
Das Lademodul wird in verschiedenen Varianten gefertigt. Es kann entweder eine Mini-USB oder eine Micro-USB Buchse besitzen. Die Farben der Status-LEDs des Lademoduls variieren ebenfalls.
Nachdem das USB Kabel mit der Stromversorgung und der Ladebuchse verbunden wurde, leuchtet eine (im Regelfall) orange bzw. rote LED während der Akku lädt. Ist der Ladevorgang abgeschlossen, wird dies durch eine blaue bzw. grüne LED angezeigt.
Das vollständige Aufladen eines leeren Akkus nimmt mehrere Stunden in Anspruch. Das Lademodul schützt ihn dabei vor Überladung und Tiefentladung.
Flashen der Firmware
Dieser Abschnitt beschränkt sich exemplarisch auf das Flashen der Firmware unter Microsoft Windows. Eine Anleitung für MacOS von @Tozzi ist im Hobbybrauerforum oder auf der Projektseite www.ispindel.de zu finden.
Benötigt werden:
- ein Micro-USB Kabel (4‑adrig verdrahtet)
- eine iSpindel mit vollständig aufgeladenem Akku
- der offizielle Treiber für den Wemos
- das Nodemcu Flashtool ESP8266Flasher
- das aktuelle Firmware Release der iSpindel
Als Vorbereitung muss der Wemos Treiber einmalig auf den PC heruntergeladen und installiert werden. Anschließend werden der ESP8266Flasher und die aktuelle iSpindel Firmware heruntergeladen und die “ESP8266Flasher.exe” gestartet. Bei ausgeschalteter iSpindel werden noch keine MAC Adressen des Wemos erkannt.

Abb 4: iSpindel ausgeschaltet
Bevor der Flashvorgang gestartet werden kann, muss im ESP8266Flasher die heruntergeladene “Bin Datei” der iSpindel Firmware ausgewählt werden.
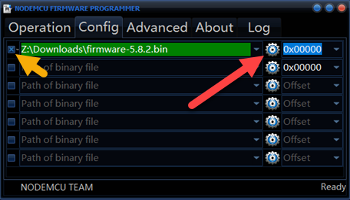
Abb 5: Firmware auswählen
In der Registerkarte “Config” wird dazu die Bin-Datei der heruntergeladenen iSpindel Firmware ausgewählt (roter Pfeil) und sichergestellt, dass nur die entsprechende Zeile aktiviert ist (gelber Pfeil).
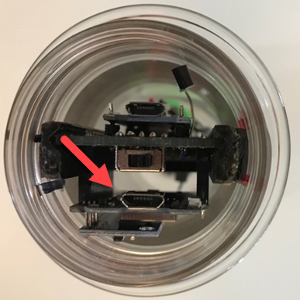
Abb 6: Micro-USB-Port
Anschließend wird die iSpindel über den Micro-USB-Port des Wemos mit dem PC verbunden und eingeschaltet.
Nach dem Einschalten wird die iSpindel automatisch durch Windows erkannt. Der ESP8266Flasher reagiert darauf und wählt selbständig den richtigen COM-Port aus. Die MAC-Adressen des Wemos werden in den unteren beiden Feldern angezeigt (gelbe Pfeile) und der Flashvorgang kann mit einem Klick auf den Flash-Button (roter Pfeil) gestartet werden.
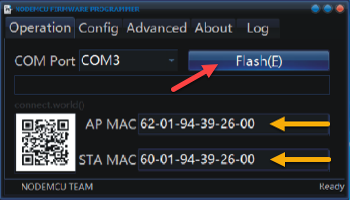
Abb 7: MAC-Adressen und Start
Der Fortschritt wird in ESP8266Flasher angezeigt.
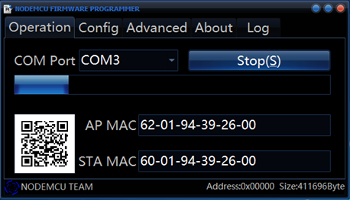
Abb 8: Während des Flashens
Der Abschluss des Flashens signalisiert ein grünes Symbol in der linken unteren Ecke.
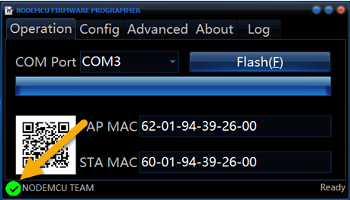
Abb 9: Flashen Ende
Die iSpindel muss nun einmal aus- und wieder eingeschaltet werden (alternativ ein Klick auf den Reset-Button des Wemos), damit die frisch geflashte Firmware geladen wird. Der Erststart kann bis zu 30 Sekunden in Anspruch nehmen, da eine Grundkonfiguration geladen wird.
Eine komplett neue iSpindel, auf der zuvor keine Firmware installiert war, startet automatisch im Konfigurationsmodus. Sollte es sich bei dem Flashvorgang um ein Firmwareupdate gehandelt haben, startet die iSpindel im dem Zustand, in dem sie sich vor dem Update befand. War sie vollständig konfiguriert, wird sie im operativen Modus starten, andernfalls im Konfigurationsmodus.
Überprüfung der iSpindel
Der Konfigurationsmodus ist an einem rhythmischen Blinken der blauen Wemos LED im Sekundentakt zu erkennen. Er kann bei einer iSpindel im operativen Modus jederzeit durch mehrmaliges Drücken des Wemos Reset-Tasters im Sekundentakt wieder aufgerufen werden.
Im Konfigurationsmodus stellt die iSpindel einen WiFi AccessPoint mit der SSID “iSpindel” bereit. Zum Konfigurieren und Überprüfen der iSpindel greift man sich ein WLAN-fähiges Gerät, sucht in den WLAN Einstellungen des Gerätes nach dem Netzwerk mit der SSID “iSpindel” und verbindet sich damit.
Ist die WLAN Verbindung hergestellt, wird die iSpindel Konfiguration entweder nach kurzer Zeit automatisch durch ein “Captive Portal” in einem Browserfenster geöffnet (iOS, OS X) oder man kann sie händisch mit einem beliebigen Webbrowser unter der URL http://192.168.4.1 aufrufen. Wenn sich der Browser unter iOS nicht mehr automatisch öffnet, hilft es, den gespeicherten AccessPoint “iSpindel” einmal manuell zu löschen (“Dieses Netzwerk ignorieren”).
-
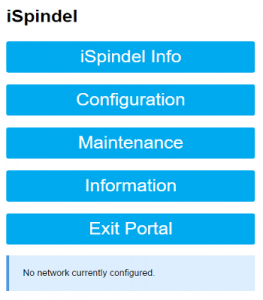
- Abb 10: Konfigurationsmenü
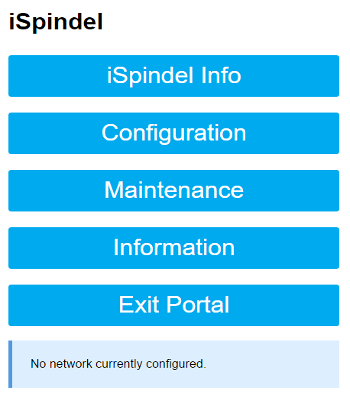
-

- Abb 11: Infoseite
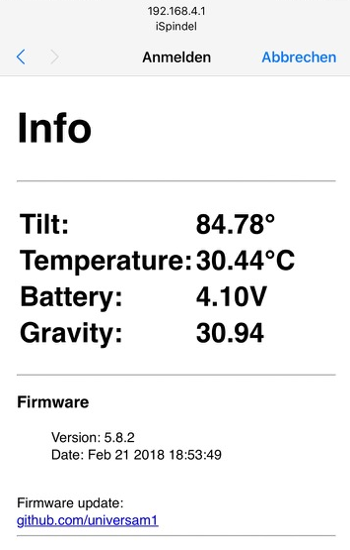
Nun ist es an der Zeit, die ordnungsgemäße Funktion der frisch gelöteten iSpindel im Menü “iSpindel Info” zu prüfen. Die Infoseite zeigt den aktuellen Status der Sensoren an. Zu beachten ist, dass nur eine fertig zusammengebaute iSpindel an dieser Stelle wie erwartet funktionieren wird.
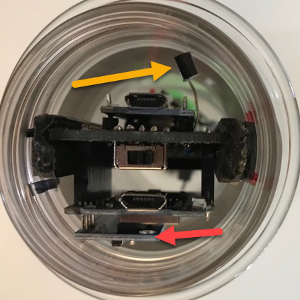
Abb 12: Temperatursensor
Berührt man den Temperatursensor (gelber Pfeil) mit dem Finger, dann wird die angezeigte Temperatur auf der Infoseite steigen. Neigt man die Platine mit dem Wemos verändert sich der Neigungswinkel (Tilt). Ist dies der Fall, wurde die iSpindel fehlerfrei zusammengelötet und die Hardware ist in Ordnung.
Die Messwerte müssen zu diesem Zeitpunkt nicht stimmen. Besonders die Temperatur wird im Konfigurationsmodus aufgrund der Selbsterwärmung durch die kurzen Messintervalle immer zu hoch angezeigt.
Eine Temperaturanzeige von ‑127 °C deutet auf eine Störung des Temperatursensors, oder wahrscheinlicher, auf einen Fehler beim Zusammenbau hin (Sensor falsch herum eingelötet, Kurzschluss gelötet, kalte Lötstelle etc.). Ein konstanter Tilt-Wert von 0° beruht auf den gleichen Ursachen, beim Gyroskop Sensor MPU6050 (roter Pfeil).
Fehlersuche
Sollte man trotz gewissenhafter Montage weitere Probleme haben, empfiehlt es sich unbedingt das Protokoll (Log) der iSpindel auszulesen! Über den USB Anschluss ist es möglich eine serielle Verbindung zur iSpindel aufzubauen und die protokollierten Nachrichten der iSpindel in einem Terminalfenster anzuzeigen. Der Kommunikationsablauf und etwaige Fehlermeldungen sind hier zu sehen. Die genaue Vorgehensweise ist auf der Projektseite und in diesem Youtube Video erläutert.
Endmontage der iSpindel
Ist die Hardware in Ordnung kann die iSpindel komplett zusammengebaut werden.
Der Akku und dessen unteres Anschlusskabel werden mit einem Kabelbinder am Schlitten befestigt. Die Trimmgewichte können wahlweise seitlich des Akkus mit Heißkleber fixiert oder in Form von Bleigranulat mit Epoxidharz in die Spitze des Petlings geklebt werden.

Abb 13: Verklebte Gewichte
Beide Varianten funktionieren gut, und beide haben ihre Stärken und Schwächen. Vor allem ist darauf zu achten, dass die Gewichte gleichmäßig und auf der Akkuseite des Schlittens angeklebt werden, bzw., dass das Epoxidharz mit dem Bleigranulat bei senkrecht stehendem Petling aushärtet. Ebenfalls wichtig ist das Gewicht der Trimmung.
Der gemessene Tilt-Wert der iSpindel wird in den Grenzbereichen (0–10°, 80–90°) ungenau und man erhält keine verlässlichen das Messergebnisse. Es ist essentiell, die iSpindel durch Trimmgewichte in den optimalen Winkelbereich zu bringen.
Abb 14: Bleigranulat in Harz
Werden die Trimmgewichte so gewählt, dass der Tilt-Wert in Leitungswasser über 10° und in der Anstellwürze des jährlichen SuperHighGravity-Strong-Imperial Winterbieres unter 80° bleibt, ist alles in bester Ordnung. Ungefähre Tilt-Werte in Leitungswasser zwischen 15° und 35° haben sich gut bewährt. Bei der Trimmung mit Bleigranulat erreicht man die Werte mit ca. 15 Gramm Blei in der Petlingspitze. Wird der Ballast an den Akku und den Schlitten geklebt, sind etwa 20–23 Gramm Gewicht erforderlich.
3D Mechatronics plant mittelfristig eine aktualisierte Version des 3D-Druck-Schlittens zusammen mit passenden Trimmgewichten auszuliefern. Diese werden sich, ähnlich der Bleigranulat-Variante, weit in der Petlingspitze befinden, jedoch fest montiert am Schlitten, damit man den Petling von Zeit zu Zeit austauschen kann, ohne die Kalibrierung zu verlieren. Hierdurch sollte die Trimmung zukünftiger iSpindeln erheblich vereinfacht werden.
Die letzten Schritte
Abschließend wird der Gyroskopsensor zusätzlich mit Heißkleber am WiFi Modul des Wemos fixiert, die Platine in die Nut des Schlittens geklebt, alle losen Teile (Kabel etc.) mit Heißkleber am Schlitten befestigt und der fertig bestückte Schlitten in den Petling geschoben. Nun ist die iSpindel einsatzbereit und kann kalibriert werden.
-
- Abb 15: Fixierter Gyroskosensor

-
- Abb 16: Verklebter Schlitten
Kalibrierung
Zur Kalibrierung noch ein abschließender Hinweis. Viel hilft nicht besonders viel. Das ermittelte Polynom zur Extraktberechnung %w/w (°P) arbeitet bereits mit 3–4 Messpunkten (Plato-Tilt-Pärchen) ausreichend genau. Durch die Störeinflüsse von Kräusen, Brandhefe, CO2-Bläschen und Ablagerungen vom Stopfhopfen wird der gemessene Tilt-Wert und der daraus errechnete Extraktgehalt immer gewissen Toleranzen unterliegen, die nicht vollständig durch aufwendig detaillierte Kalibrierungen kompensiert werden können.
Schnellstart ohne Kalibrierung
Grundsätzlich recht es, wenn man den Neigungswinkel der iSpindel in Leitungswasser kennt. Dieser sollte bei ca. 25 (+/- 10) Grad Neigung liegen und beim Überprüfen der Trimmung notiert werden.
Ebenso muss eine Ausgabe der Daten an Ubidots, den RasPi Server, Craftbeer Pi etc. konfiguriert werden. Anschließend kann die iSpindel bereits in den Gäreimer eines realen Sudes. Dort ist der Extraktgehalt der Anstellwürze bekannt.
Beim Schlauchen nach der Gärung wird der Restextrakt per Refraktometer, Spindel oder EasyDens gemessen. Die passenden Tilt-Werte der Anstellwürze und des endvergorenen Jungbiers können dem “Daten-empfangenden System” entnommen werden.
Auf diese Weise sind bereits drei “gute” Plato-Tilt-Pärchen bekannt, die unter den Störeinflüssen von Brandhefe, CO2-Bläschen etc. ermittelt wurden. Diese Plato-Tilt-Pärchen bilden eine sehr gute Basis zur Ermittlung des Polynoms für die Berechnung des Extraktgehalts. Nach dem gleichen Prinzip können weitere Plato-Tilt-Pärchen bei den nächsten Gärungen ergänzt und das Polynom dynamisch verfeinert werden.
Weitere Methoden sind auf der Projektseite beschrieben.
Weitere Informationsquellen zur Montage und den Betrieb der iSpindel
Für den Zusammenbau und die Ersteinrichtung einer iSpindel stehen diverse Informationsquellen im Internet zur Verfügung.
Die Firmware, aktuelle Informationen aus erster Hand und eine Übersicht mit häufig gestellten Fragen findet man auf der Github Projektwebsite (https://github.com/universam1/iSpindel).
Die aktuelle Version der Montageanleitung von 3D Mechatronics ist bei dem iSpindel-Komplettpaket im Onlineshop des Händlers verlinkt.
Darüber hinaus findet man gute bebilderte Anleitungen und Videos von Usern, die den Einstieg sehr erleichtern (z.B. http://alles-ausser-arbeit.blogspot.de/2017/09/wir-brauen-bier-ispindel.html oder https://tinyurl.com/JW-iSpindel-FAQ).
Internationale Supportanfragen und Feature-Requests platziert man am besten direkt auf der Projektwebsite (www.iSpindel.de).
Offene Fragen und viele Themen rund um die iSpindel werden im deutschsprachigen Raum vor allem im Hobbybrauer-Forum diskutiert (https://hobbybrauer.de/forum/viewtopic.php?f=58&t=11826). Dort erhält man auch freundliche Unterstützung bei Startschwierigkeiten und Hilfe beim Zusammenbau. Auch Interessenten ohne Löterfahrung oder ohne eigene Löttechnik wird kollegial geholfen.
Abbildungen:
- Abb. 1, 2: Anleitung 3D Mechatronics (www.3d-mechatronics.de)
- Alle Anderen: Autor